StormDog
New member
I found AzBilliards while investigating what diameter and radius cue tip I should get with the new pool cue I'm buying. I did some drawings and posted them here.
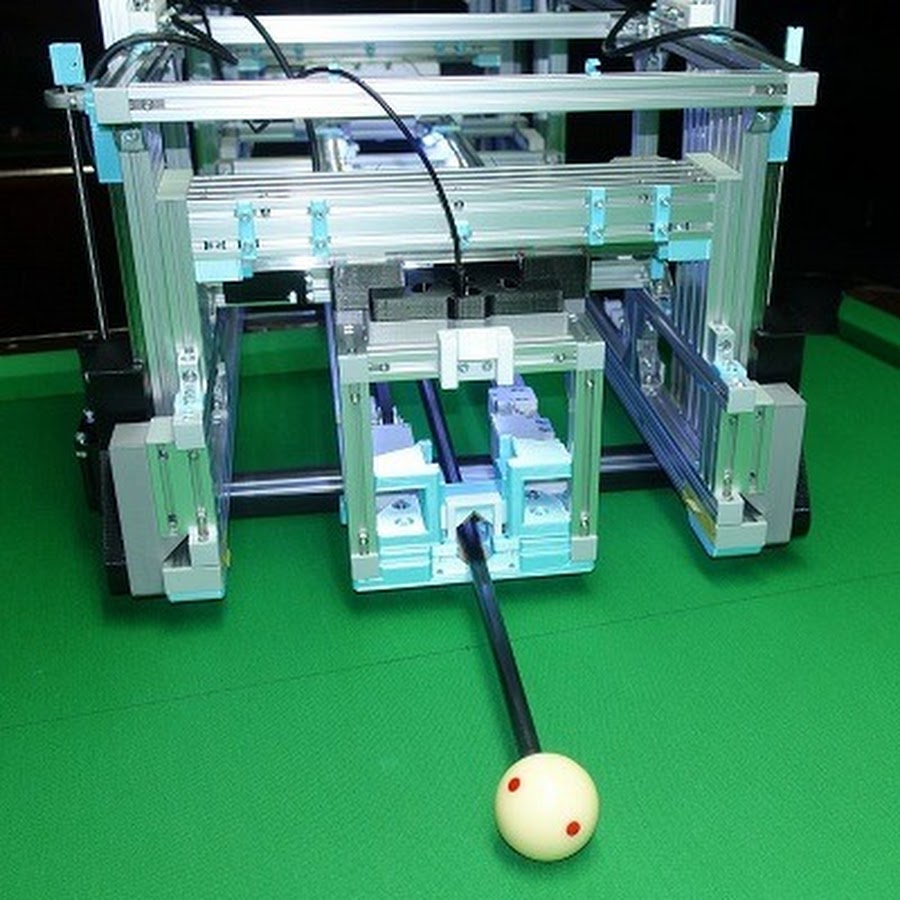
That made me remember a slightly interesting physics demo I helped some high school students build a few years back. It was part of what was called the "Carousel of Physics" that included 12 pie shaped sectors, each with four demos related to a principle of physics. My sector was on force and momentum. The pool-shot demo basically recycled a miniature cue ball and an object ball over and over and shot the object ball into a target which moved to various angles.
I hadn't thought about this for a long time. It was fun helping the kids. Another interesting project I helped with was to the left of the pool-shot. It was a little robot arm that lifted a cup onto a second flat robot arm that then moved away sideways so fast that the cup fell straight down into it's original position. It was meant to simulate pulling a tablecloth out from under wine glasses without knocking them over. I need to find a better video of that one.
Anyway, I look forward to reading through this site. I'd like to get better at pool, and I enjoy learning about pool physics and techniques.
Maybe this thread could be a source of pool related robot and machine links? -Not that this first one is THAT impressive, but it was from a high school.
Pool-Shot Physics Demo Robot:
Carousel of Physics: (partial tablecloth demo at 1:27)
That made me remember a slightly interesting physics demo I helped some high school students build a few years back. It was part of what was called the "Carousel of Physics" that included 12 pie shaped sectors, each with four demos related to a principle of physics. My sector was on force and momentum. The pool-shot demo basically recycled a miniature cue ball and an object ball over and over and shot the object ball into a target which moved to various angles.
I hadn't thought about this for a long time. It was fun helping the kids. Another interesting project I helped with was to the left of the pool-shot. It was a little robot arm that lifted a cup onto a second flat robot arm that then moved away sideways so fast that the cup fell straight down into it's original position. It was meant to simulate pulling a tablecloth out from under wine glasses without knocking them over. I need to find a better video of that one.
Anyway, I look forward to reading through this site. I'd like to get better at pool, and I enjoy learning about pool physics and techniques.
Maybe this thread could be a source of pool related robot and machine links? -Not that this first one is THAT impressive, but it was from a high school.
Pool-Shot Physics Demo Robot:
Carousel of Physics: (partial tablecloth demo at 1:27)
Last edited:
")

 :
: